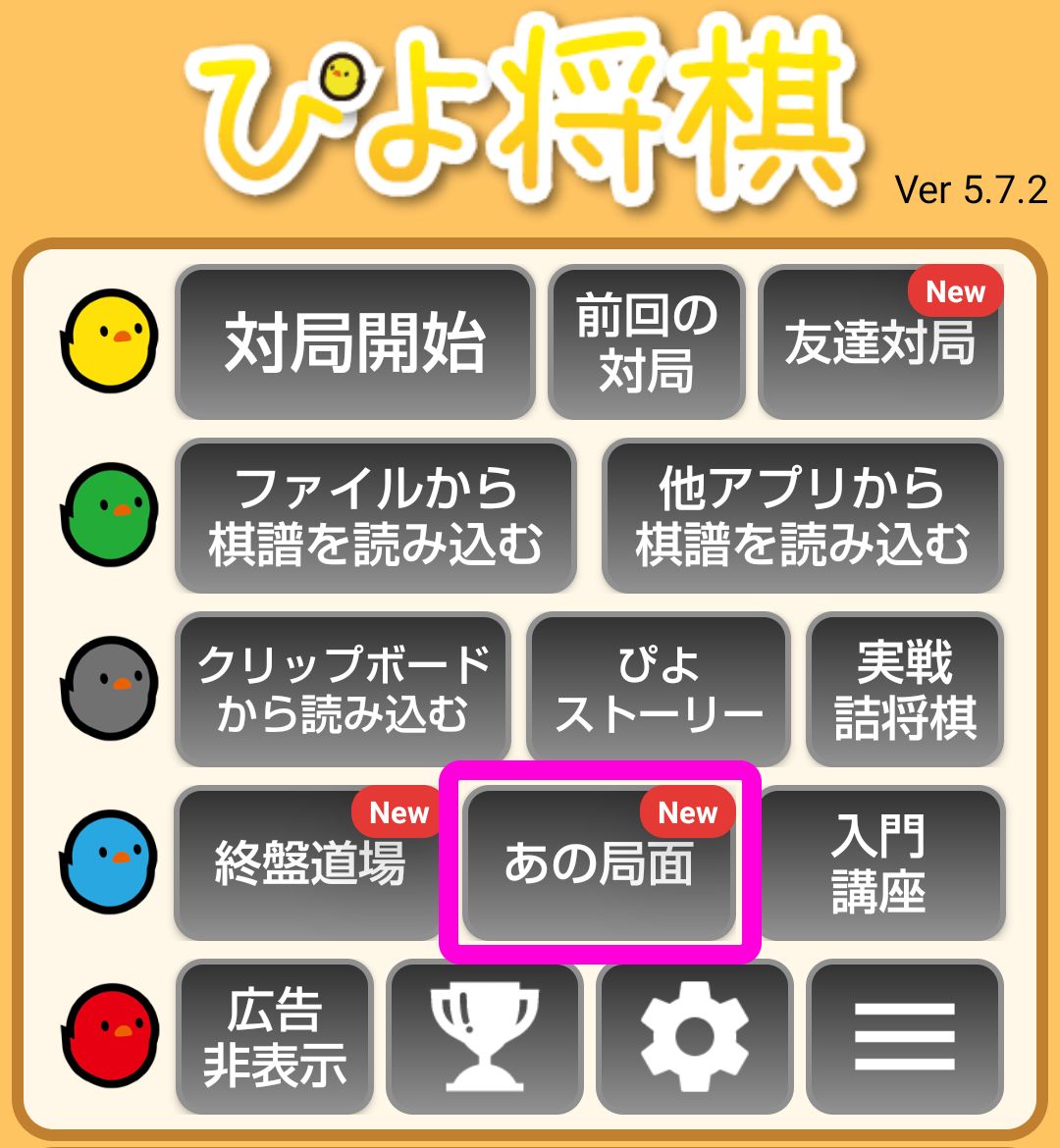
新機能「あの局面に再挑戦」(略称:あの局面)を実装しました‼
ピヨとの対局で負けたあと、棋譜解析結果をもとに、悪手を指した局面を自動的に保存します。
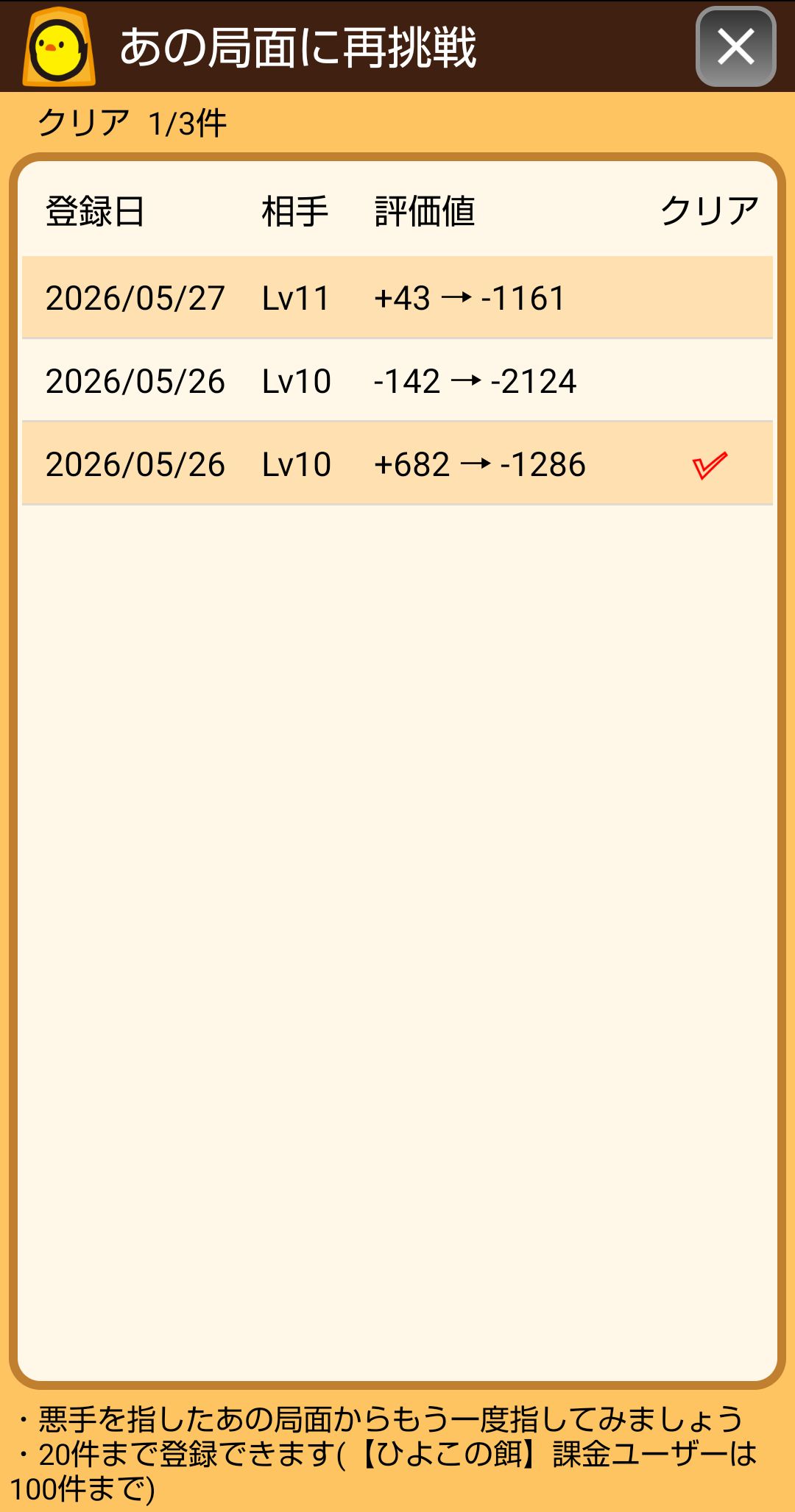
保存された局面には、あとから再挑戦できます。
解析結果を見るだけでなく、指して復習
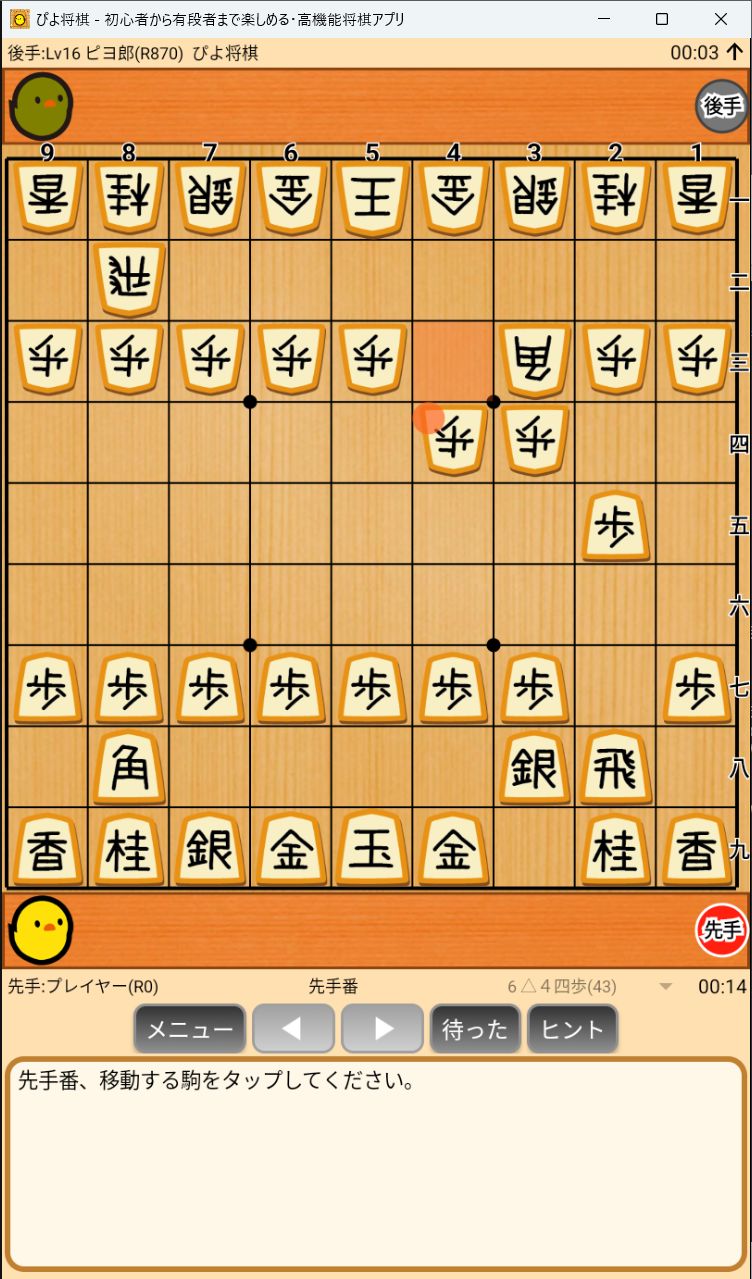
棋譜解析では、どの手が悪手だったのか、また代わりにどのような良い手があったのかを確認できます。
「あの局面に再挑戦」では、その局面から実際にもう一度指すことで、次は推奨手や、より良い手を自分で指せるかどうかを確認できます。
これまでも、棋譜解析結果などで気になる局面を見つけた場合、その局面から指し直すことはできました。
今回の「あの局面に再挑戦」では、ピヨに負けた対局の棋譜解析結果から、悪手を指した局面を自動的に抽出して保存します。
そのため、対局直後には確認しただけで終わりがちな局面でも、あとから「あの局面」として振り返り、再挑戦できるところが大きなポイントです。

局面が保存される条件
局面が保存される主な条件は以下のとおりです。
- ピヨとの通常対局であること
※ぴよストーリー・実戦詰将棋・終盤道場は対象外です - ピヨに負けた対局であること
- 棋譜解析を実行
- 推奨手を指していれば「互角以上・優勢未満」だった局面で、悪手を指したこと
- 最序盤の局面ではないこと
- 1対局につき保存される局面は1つまで
対象となるのは、勝敗に影響しやすい中盤以降の悪手局面です。
「推奨手を指していれば十分に戦えた局面」や、「ここで形勢を大きく損ねてしまった局面」を中心に保存されるようになっています。
そのため、すべての敗局で必ず局面が保存されるわけではありません。
悪手が少ない上級者の方は、局面が保存されにくい場合があります。
保存対象となる局面の条件は、今後も調整していく予定です。
自分で局面を保存する
ver5.7.4から上記の自動保存だけでなく、好きな局面を保存できるようになりました。
【保存方法】
対局画面のメニューから「[あの局面に再挑戦]に保存」を選択します。
【登録できる条件】
・ピヨとの通常対局
・プレイヤー側が指した局面
・棋譜解析している
・推奨手が表示されている
保存できる局面数
保存できる局面は20件までです。※「ひよこの餌」課金ユーザーの方は、100件まで保存できます。
上限を超えた場合は、クリア済みの局面、古い局面の順に自動で削除されます。
気になる局面は早めに再挑戦して、復習にご活用ください。
まとめ
「あの局面に再挑戦」は、ピヨとの対局で負けた原因になりやすい局面を自動で保存し、あとからもう一度挑戦できる機能です。
負けた対局をそのまま終わりにせず、「どこで間違えたのか」「次はどう指せばよいのか」を振り返るきっかけとして活用できます。
対局後に登録された「あの局面」に再挑戦して、次は勝ちにつながる一手に変えていきましょう。